



●VHDLのNOP操作とは?
VHDLプログラミングの分野で、NOP操作は特別な役割を果たします。
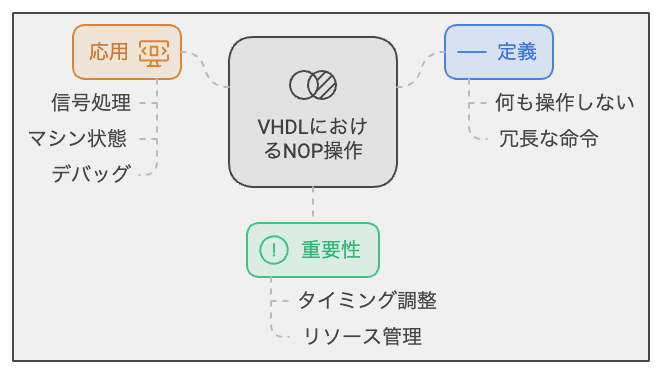
NOP(No Operation)とは、文字通り「何も操作しない」という意味です。
一見すると無駄な命令に思えるかもしれませんが、実際にはVHDL設計において非常に重要な機能を持っています。
○NOP操作の定義と重要性
NOP操作は、プログラムの実行フローを制御するための空の命令です。
NOP命令が実行されると、プロセッサは1クロックサイクルを消費しますが、状態の変更は行いません。
NOP操作の重要性は、次の点にあります。
- タイミング調整 -> 特定の操作間に遅延を挿入する際に使用します。
- パイプライン制御 -> パイプラインステージ間のバランスを取るのに役立ちます。
- デバッグ支援 -> 特定のポイントでプログラムの実行を一時的に停止させることができます。
- リソース管理 -> 共有リソースへのアクセスを制御する際に活用できます。
○VHDLでのNOP実装方法
VHDLでNOP操作を実装する方法はいくつか存在します。
最も一般的な方法は、空のプロセス文を使用することです。
○サンプルコード1:基本的なNOP操作の記述
ここでは、基本的なNOP操作の実装例を紹介します。
このサンプルコードでは、NOP操作を利用して入力データの処理を1クロックサイクル遅延させています。
reset信号がアクティブ高の場合、data_regは0にリセットされます。
それ以外の場合、クロックの立ち上がりエッジでNOP操作が実行され、次のサイクルでdata_inの値がdata_regに格納されます。
●NOP操作の活用シーン5選
NOP操作は、様々な場面で活用されます。
ここでは、5つの主要な活用シーンを紹介します。
○サンプルコード2:信号処理におけるNOP
信号処理では、NOP操作を使ってタイミングを調整することがあります。
このコードでは、入力データに1を加算する簡単な処理を行っています。
NOP操作により、データ入力と処理の間に1クロックサイクルの遅延を挿入しています。
○サンプルコード3:マシンステートでのNOP活用
ステートマシンにおいても、NOP操作は有用です。
このコードでは、WORKING状態とDONE状態の間にNOP_STATEを挿入しています。
NOP操作により、作業完了前に一定の待機時間を設けることができます。
○サンプルコード4:パイプライン処理とNOP
パイプライン処理においても、NOP操作は重要な役割を果たします。
このコードでは、3段階のパイプライン処理を実装しています。
各ステージ間にNOP操作を挿入することで、パイプラインのタイミングを調整し、データの衝突を防いでいます。
○サンプルコード5:デバッグ時のNOP活用
デバッグ時にも、NOP操作は非常に有用です。
このコードでは、debug_point信号がアクティブの場合、NOP操作を実行してデータ処理を一時停止します。
デバッグポイントを設定することで、特定の条件下での回路の動作を詳細に観察できます。
○サンプルコード6:リソース管理におけるNOP
最後に、リソース管理におけるNOP操作の活用例を紹介します。
このコードでは、共有リソースの管理にNOP操作を活用しています。
リソースがビジー状態の場合、NOP操作を実行して待機します。
リソースが利用可能になるまでNOP操作を繰り返すことで、リソースの競合を回避し、効率的なリソース管理を実現しています。
●NOPと他の命令の比較
VHDLプログラミングでは、NOP操作以外にも似たような機能を持つ命令が存在します。
NOP操作の特徴をより深く理解するために、他の命令と比較してみましょう。
○NOP vs WAIT文/使い分けのポイント
NOP操作とWAIT文は、どちらも処理を一時的に停止させる機能を持っています。
しかし、その動作には重要な違いがあります。
NOP操作は、クロックサイクルを消費しますが、プロセスの実行は継続されます。
一方、WAIT文は、指定された条件が満たされるまでプロセスの実行を完全に停止します。
WAIT文の基本的な構文は次のようになります。
NOP操作とWAIT文の使い分けのポイントは次の通りです。
- タイミング制御の精度 -> NOP操作はクロックサイクル単位での制御が可能です。WAIT文は条件に応じて可変的な待機時間を設定できます。
- リソース消費 -> NOP操作は常にクロックサイクルを消費しますが、WAIT文は条件が満たされるまでリソースを解放します。
- シミュレーションでの挙動 -> NOP操作はシミュレーション時間を進めますが、WAIT文はシミュレーション時間を停止させる場合があります。
例えば、特定の信号が変化するまで待機する場合は、WAIT文が適しています。
一方、正確に1クロックサイクルだけ待機する場合は、NOP操作が適しています。
○NOP vs NULL文/どちらを選ぶべき?
NOP操作とNULL文も、一見似たように見えますが、実際の動作は大きく異なります。
NULL文は、文字通り何も行わない空の文です。
NOP操作がクロックサイクルを消費するのに対し、NULL文はクロックサイクルを消費しません。
NULL文の基本的な構文は次のようになります。
NOP操作とNULL文の選択基準は次の通りです。
- タイミング制御 -> NOP操作はクロックサイクルを消費するため、タイミング制御に使用できます。NULL文はタイミング制御には適しません。
- コード構造 -> NULL文は、条件分岐の空のブランチを明示的に示すために使用されることがあります。
- シンセシス結果 -> NOP操作は実際のハードウェアリソースを消費する可能性がありますが、NULL文は通常、シンセシス時に最適化され、リソースを消費しません。
例えば、条件分岐で特定の条件下で何も行わない場合、NULL文を使用します。
一方、クロックサイクルを意図的に消費する場合は、NOP操作を使用します。
○レジスタ操作とNOPの関係性
VHDLにおいて、レジスタ操作とNOP操作は密接な関係があります。
レジスタは、デジタル回路で値を保持するための基本的な構成要素です。
NOP操作は、レジスタの値を変更せずにクロックサイクルを消費する手段として使用されます。
レジスタ操作とNOP操作の関係性は次の点で重要です。
- データの保持 -> NOP操作中、レジスタの値は変更されません。つまり、前回のクロックサイクルのデータが保持されます。
- パイプライン制御 -> 複数のレジスタを使用するパイプライン処理において、NOP操作を挿入することで、データの流れを制御できます。
- タイミング調整 -> レジスタ間のタイミングを調整する際、NOP操作を使用してクロックサイクルを調整できます。
次のコードで、レジスタ操作とNOP操作の関係性を見てみましょう。
このコードでは、control信号が’1’の時にレジスタ操作を行い、’0’の時にNOP操作を行います。
NOP操作中、reg1とreg2の値は変更されず保持されます。
●VHDLデザイナーのためのNOP最適化テクニック
VHDLデザイナーにとって、NOP操作の最適化は重要なスキルです。
適切なNOP操作の使用は、回路の性能向上やデバッグの効率化につながります。
ここでは、NOP操作の最適化テクニックをいくつか紹介します。
○サンプルコード7:条件付きNOPの実装
条件付きNOPは、特定の条件下でのみNOP操作を実行する手法です。
複雑な制御フローを持つ回路設計で特に有用です。
このコードでは、condition信号が’1’の時にNOP操作を実行し、’0’の時にデータ処理を行います。
条件付きNOPにより、特定の状況下でのみ処理を一時停止させることができます。
○サンプルコード8:NOPを用いたタイミング調整
NOPを使用したタイミング調整は、複雑な回路設計においてしばしば必要となります。
特に、異なる処理速度を持つコンポーネント間の同期を取る際に有効です。
このコードでは、データ処理後に2クロックサイクルのNOP操作を挿入しています。
状態遷移を利用することで、正確なタイミング調整が可能となります。
○サンプルコード9:複雑な制御フローでのNOP活用
複雑な制御フローを持つ回路設計では、NOP操作を戦略的に配置することで、全体の動作を最適化できます。
このコードでは、異なる処理モードに応じて、NOP操作を選択的に挿入しています。
複雑な制御フローにおいて、NOP操作を適切に配置することで、各処理モード間のバランスを取っています。
○サンプルコード10:エラーハンドリングにおけるNOP
エラーハンドリングは、信頼性の高いVHDL設計において欠かせない要素です。
NOP操作を効果的に活用することで、エラー発生時の動作を精密に制御し、システムの耐障害性を高めることが可能となります。
ここでは、エラーハンドリングにNOP操作を組み込んだサンプルコードを見てみましょう。
このコードでは、エラーフラグが立った際にERROR_WAIT状態に移行し、NOP操作を実行します。ERROR_WAIT状態では、エラーカウンタをインクリメントしながら、一定回数のNOP操作を繰り返します。
NOP操作を用いたエラーハンドリングには、次のような利点があります。
- エラー発生時の即時対応 -> エラーフラグ検出後、直ちにNOP状態に移行し、不正なデータ処理を防止します。
- 柔軟なリカバリー機構 -> NOP操作の回数を調整することで、エラーの重大度に応じた待機時間を設定できます。
- システムの安定性向上 -> エラー発生時にNOP操作を挟むことで、システムに一時的な休止期間を与え、状態の安定化を図ります。
- デバッグの容易さ -> NOP状態中にエラー情報を保持することで、後続のデバッグ作業を支援します。
エラーハンドリングにNOP操作を組み込むことで、VHDLデザインの信頼性と堅牢性が大幅に向上します。
特に、高信頼性が要求される産業用システムや医療機器など、クリティカルな応用分野において、NOP操作は不可欠な要素となります。
●よくあるNOP操作のエラーと対処法
NOP操作は、VHDLプログラミングにおいて非常に有用なツールですが、適切に使用しないと予期せぬエラーや性能低下を引き起こす可能性があります。
ここでは、NOP操作に関連する一般的なエラーとその対処法について詳しく解説します。
○シンタックスエラーの回避方法
シンタックスエラーは、NOP操作を実装する際によく発生する問題です。
NOP操作自体は「何もしない」命令ですが、VHDLの文法規則に従って正しく記述する必要があります。
一般的なシンタックスエラーの例として、空のプロセス文を使用する際に誤って記述してしまうケースがあります。
正しい記述方法は次の通りです。
誤った記述例
シンタックスエラーを回避するためには、VHDLの文法規則を十分に理解し、コードを注意深く記述することが重要です。
また、統合開発環境(IDE)やシンタックスチェッカーを活用することで、エラーを早期に発見し修正することができます。
○タイミング違反を防ぐNOPの使い方
NOP操作を不適切に使用すると、タイミング違反を引き起こす可能性があります。
タイミング違反は、信号が適切なタイミングで伝播しない状況を指し、回路の誤動作の原因となります。
タイミング違反を防ぐためには、次の点に注意してNOP操作を使用する必要があります。
- クリティカルパスの考慮 -> NOP操作をクリティカルパス上に配置すると、全体のタイミングに影響を与える可能性があります。クリティカルパスを慎重に分析し、NOP操作の挿入位置を適切に選択しましょう。
- クロックドメイン間の同期 -> 異なるクロックドメイン間でNOP操作を使用する場合、同期の問題に注意が必要です。適切な同期機構を実装することで、タイミング違反を防ぐことができます。
- パイプラインステージの調整 -> パイプライン処理においてNOP操作を使用する場合、各ステージの処理時間のバランスを考慮する必要があります。不均衡なNOP操作の配置は、パイプラインの効率を低下させる可能性があります。
タイミング違反を防ぐNOP操作の使用例を紹介します。
この例では、NOP操作を用いてパイプラインステージ間のタイミングを調整しています。
各ステージの処理時間が均等になるようNOP操作を配置することで、タイミング違反のリスクを軽減しています。
○過剰なNOP使用によるパフォーマンス低下の対策
NOP操作の過剰な使用は、回路のパフォーマンスを低下させる可能性があります。
NOP操作自体はクロックサイクルを消費するため、不必要なNOP操作は全体の処理速度を遅くする原因となります。
パフォーマンス低下を防ぐためには、次の対策を講じることが重要です。
- NOP操作の必要性の再評価 -> 各NOP操作が本当に必要かどうかを慎重に検討しましょう。不要なNOP操作は除去し、代替手段を検討することでパフォーマンスを向上させることができます。
- 条件付きNOP操作の活用 -> 常時NOP操作を実行するのではなく、特定の条件下でのみNOP操作を実行するよう設計することで、不要なクロックサイクルの消費を抑えることができます。
- パイプライン構造の最適化 -> NOP操作を用いてパイプラインのバランスを取る代わりに、パイプラインステージ自体を再設計することで、より効率的な処理を実現できる可能性があります。
- 並列処理の検討 -> NOP操作を用いて待機時間を作る代わりに、並列処理を導入することで、全体的なパフォーマンスを向上させることができます。
ここでは、過剰なNOP使用を最適化した例を見てみましょう。
この例では、process_flagが’1’の場合にのみデータ処理を行い、’0’の場合はNOP操作を実行します。
必要な場合にのみNOP操作を実行することで、不要なクロックサイクルの消費を抑えています。
●NOP操作の応用例
NOP操作の理解を深めるため、実際の応用例を見ていきましょう。
様々なアーキテクチャやデザインパターンにおいて、NOP操作がどのように活用されているかを学ぶことで、より効果的なVHDL設計が可能となります。
○サンプルコード11:MIPSアーキテクチャでのNOP
MIPSアーキテクチャは、シンプルで効率的な命令セットを特徴とするRISCプロセッサアーキテクチャです。
MIPSアーキテクチャにおいて、NOP操作は重要な役割を果たします。
ここでは、MIPSアーキテクチャのパイプラインにおけるNOP操作の使用例を紹介します。
この例では、MIPSアーキテクチャの基本的なパイプライン構造を模しています。
NOP命令(opcode “000000”)を検出した場合、EXECUTE、MEMORY、WRITEBACKステージをスキップし、直接FETCHステージに戻ります。
○サンプルコード12:FPGAデザインにおけるNOP活用
FPGAデザインにおいて、NOP操作は柔軟な制御フローの実現に役立ちます。
特に、動的な処理の調整やリソースの効率的な利用において、NOP操作は重要な役割を果たします。
ここでは、FPGAデザインにおけるNOP操作の活用例をみてみましょう。
この例では、FPGAリソースを効率的に利用するため、異なる演算操作をNOP操作と組み合わせて実装しています。
operation_selectの値に応じて、ADD、SUBTRACT、MULTIPLYの操作を行い、それ以外の場合はNOP操作を実行します。
○サンプルコード13:シミュレーションでのNOP使用
VHDLのシミュレーションにおいて、NOP操作は特定のタイミングや状態を再現するのに役立ちます。
シミュレーション時のNOP操作の使用例をみてみましょう。
このサンプルコードでは、シミュレーション環境でNOP操作を再現しています。
メインシミュレーションプロセスでは、データ処理のループ中に条件付きでNOP操作を挿入しています。
3の倍数のループ回数で2クロックサイクルのNOPを実行し、nop_counterをインクリメントします。
結果表示プロセスでは、各クロックサイクルでのデータ値とNOP操作の回数を報告します。
シミュレーションを実行すると、NOP操作が挿入されたタイミングでデータ処理が一時停止し、nop_counterが増加する様子を確認できます。
○サンプルコード14:クロック同期設計とNOP
クロック同期設計において、NOP操作は異なるクロックドメイン間の調整や、特定の条件下でのクロックサイクルのスキップに使用されます。
ここでは、クロック同期設計でのNOP操作の活用例を紹介します。
このサンプルコードでは、高速クロックドメインと低速クロックドメイン間のデータ転送をNOP操作を用いて同期しています。
高速クロックドメインでデータを受け取り、sync_flagを設定します。
低速クロックドメインはsync_flagを確認し、設定されている場合にのみデータを転送します。
両方のドメインで、適切なタイミングでNOP操作を実行することで、クロックドメイン間の安全なデータ転送を実現しています。
まとめ
VHDLにおけるNOP操作は、一見単純な「何もしない」命令ですが、実際には多岐にわたる活用方法が存在します。
本記事では、NOP操作の基本から応用まで、幅広いトピックを網羅的に解説しました。
VHDLデザイナーとしてのスキルを向上させるためには、NOP操作を含む様々なテクニックを習得し、実際のプロジェクトで活用していくことが重要です。
紹介した技術や考え方を基に、より複雑で効率的なVHDL設計にチャレンジしてみてください。